
빠른 리액션은 기본, 높은 생산성도 갖춰
세이프티 로보틱 시스템 / B&R코리아 임의진 부장
세이프티의 중요한 기능은 안전이다. 위험 신호 시 가능한 한 빨리 기계 작동을 멈추게 해야 한다. 세이프티로 작업자의 안전은 지킬 수 있지만 생산성 측면에서는 비효율적일 수 있다. 따라서 세이프티는 안전성 못지않게 중요하게 고려되어야 하는 부분이 생산성이다. B&R코리아의 SafetyROBOTICS는 기계의 효용성은 최대한 유지하면서 작업자의 안전을 지켜줄 수 있는 시스템이다.
임근난 기자 (fa@hellot.net)
기계 운전에는 기본적으로 들어가는 필요한 부품들이 있다. 우선 기계를 제어하기 위해 PLC와 같은 제어장치들이 들어가게 된다. 그리고 분산제어 시스템 방식에서는 분산제어 시스템에 대한 I/O 모듈이 들어가게 되고, 모션제어를 하기 위한 서보 드라이버나 리니어 드라이버, 인버터 등 시스템이 들어가게 된다. B&R은 이더넷 기반의 실시간이 보장되는 파워링크라는 프로토콜을 사용해 각각의 디바이스를 연결한다. 즉, 통합된 세이프티 테크놀로지 개념이라고 할 수 있다.
기존 세이프티는 세이프티를 사용하기 위해서 별도 추출한 세이프티 모듈을 가지고 세이프티 디바이스를 추가로 사용했으나 B&R에서 제공하는 세이프티는 기존에 사용된 하드웨어 구성을 그대로 유지한 채 필요한 세이프티에 대한 모듈만, 그리고 서보 드라이버의 경우도 세이프티가 지원되는 드라이버만을 사용해 운용하는 시스템이다.
안전의 관건은 빠른 리액션
세이프티의 중요한 기능은 안전이다. 그리고 안전에서 가장 중요한 관건은 빠른 리액션이다. 위험 상황이 발생했을 때 얼마나 빨리 기계 작동을 중지할 수 있느냐에 따라 작업자의 안전을 지킬 수 있기 때문이다. 현재 산업 환경에서 많이 사용되는 세이프티의 경우, 모터가 회전하고 있을 때 정지 신호를 주게 되면 80ms의 지연시간이 걸린다. 80ms는 거의 두 바퀴를 더 돌고 나서 멈추는 속도이므로, 가령 손이 들어갔을 때 그 피해는 매우 클 것이다.
그러나 B&R의 Smart Safety Reaction은 회전 중 정지 신호가 주어졌을 대 7ms, 즉 회전수로 따졌을 때 23도라는 굉장히 빠른 반응을 보여준다. 이 원리는, 서보 모터 뒤에는 엔코더라는 게 있고 엔코더를 읽기 위한 전용 컨트롤러가 하나 들어간다. 모터를 세우기 위해서는 세이프티 시스템에서 토크를 오프시켜라 등의 명령어를 주게 되는데, 그 명령어가 가기까지 지연시간이 발생하게 된다. 하지만 Smart Safety Reaction은 드라이버 자체가 세이프티 카테고리에 준한 드라이버이기 때문에 엔코더 시그널 제어 드라이버로 바로 연결되게 되어 있다. 즉, 네트워크를 통해 연결되어 있으므로 지연 시간 없이 바로 멈출 수 있다.
세이프티는 또 안전성 못지않게 중요한 것이 생산성이다. 위험 신호 시 기계 작동이 멈춤으로써 생산성이 떨어지면 세이프티를 적용하기 어렵기 때문이다. B&R의 세이프티는 기존 세이프티와는 달리 로직 컨트롤러가 있고 그 로직에 세이프티 조건을 프로그램화해서 입력하는 방식을 채용했다. 그래서 정지 신호 시 속도만을 줄이되 생산성은 최대한 높이고 안전도 확보할 수 있다.
또 하나는 기존의 일반적인 세이프티는 세이프티 디지털 인풋/아웃풋, 또는 아날로그 엔코더 신호를 사용할 때마다 하드 와이어링(전선작업)이 많이 들어가게 된다. 최근 기계는 속도가 빨라지고, 정밀도 역시 높아지고 있으며, 라인 길이도 길어지고 있다. 기계 시스템이 복잡해지면서 제어장치는 물론 세이프티를 구성하는 하드웨어 구성 역시 복잡해졌다. 따라서 이를 구성하기 위한 하드 와이어링은 더욱 복잡할 수밖에 없다. 반면, B&R의 Safe-MOTION은 모든 것이 네트워크화되어 있다. 네트워크를 통한 세이프티이므로 기존 방식의 와이어링보다 단순하고 효율적이다.
세이프티를 사용하다 보면 고장이 날 수도 있다. 서비스를 위해 엔지니어가 고장 난 세이프티 디바이스를 수리하게 되는데, 모듈을 교체했음에도 오작동이 일어나게 되면 엔지니어가 모든 책임지게 된다. 그래서 세이프티를 관장하는 엔지니어는 심한 스트레스를 받게 된다. 가령 고장 난 모듈을 새 모듈로 교체했을 때 와이어링 하나하나를 점검해 줘야 하고, A라는 프로덕트가 아닌 B라는 프로덕트로 잘 못 교체했을 때 타개할 길이 별로 없다. 그러나 B&R의 세이프티는 네트워크 시스템이기 때문에 세이프티를 관장하는 로직이 하나 있다. 바로 PLC이다. 모듈을 정확하게 교체했는지 PLC에서 알람을 통해 알려 주기 때문에 엔지니어는 모듈을 안전하게 교체할 수 있다.
세이프티라는 것은 또 카테고리, 규격, 표준을 가지고 있느냐 없느냐의 요소들이다. B&R의 Safe PLC는 세이프티에 카테고리가 있고, PLe Safety에 준한 제품이다. 이것을 운영하기 위해 PLC 안에 로직을 포함하고 있으며, 이 로직은 카테고리와 PLe Safety 규격에 준해서 개발된 소프트웨어 툴이다.
SafetyROBOTICS, 안전과 생산성 동시 만족
최근 제조 공정에 로봇 사용량이 증가하면서 작업자의 안전에 대한 관심이 높아지고 있다. 로봇암은 360도 회전하며 x, y좌표 어느 곳이나 찍으며 가공할 수 있기 때문에 움직이는 암이 미리 설정해 놓은 속도 이상 값으로 가느냐 안 가느냐가 안전을 지킬 수 있는 중요한 요소이다.
예를 들어, 레이저로 커팅하는 로봇의 경우, 로봇에서 나가는 레이저는 상당한 거리까지 미치게 된다. 로봇암의 가장 끝에 있는 툴 센터 포인트가 워크피스(Workpiece) 내에서 가공하는 것이 가장 안전하다고 할 수 있으며, 적어도 2차적으로 안전한 곳인 하우징 바를 이 툴 센터 포인트가 벗어나면 안 된다. 이것을 제어하기 위해서 가상의 수직선을 하나 긋고, 툴 센터 포인트와의 각도를 계속적으로 컨트롤해서 모니터링해준다. 그리고 각각의 로봇암에 대한 접근 금지구역을 스탠더드를 사용해서 설정한다. 로봇은 정해진 작업 공간에서 움직이도록 하는 게 가장 안정적이기 때문이다.
제어에서 그림 1처럼 Function Space(1)과 Function(2)를 가정했을 때, FS(1)에서는 90도까지 허락될 수 있게 모션 컨트롤러에서 세이프티 포지션과 세이프티 limit을 검출한다. FS(2)에서는 1도까지 허락한다. 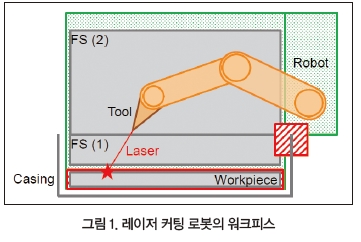
레이저가 1도를 벗어나더라도 Casing bar를 쏠 수 있기 때문에 안전상 큰 피해를 당하게 된다. 이러한 세이프티 모션을 적용해서 기계가 세이프티 조건을 벗어났을 때, 즉 세이프티 신호가 왔을 대 작동을 멈추지 않고 세이프티 limit에 대한 속도와 세이프티 limit에 대한 포지션을 적용해서 생산성을 극대화시키는 것이다. B&R의 SafeROBOTICS는 툴 센터 포인트 속도값을 제한할 수 있으며, 툴 센터 포인트 포지션값, 툴이 회전하는 값을 제한할 수 있다. 그리고 로봇 관절에 대한 포지션에 대해서도, 속도 제어나 포지션 제어를 입력해서 세이프티를 구현할 수 있다.









































































/pdf.png)
/smartmap_2_01.png)
/smartmap_2_04.png)
/smartmap_2_big_04.jpg)
/smartmap_2_05.png)
/smartmap_2_big_05.jpg)
/smartmap_2_08.png)
/smartmap_2_big_09.jpg)
/smartmap_2_09_2.png)
/smartmap_2_big_10_2.jpg)


/smartmap_2_11_2.png)
/smartmap_2_big_12_2.jpg)
/smartmap_2_02.png)
/smartmap_2_03.png)
/smartmap_2_06.png)
/smartmap_2_big_07.jpg)
/smartmap_2_07.png)
/smartmap_2_big_08.jpg)
/smartmap_2_12.png)
/smartmap_2_big_13.jpg)
/smartmap_2_13.png)
/smartmap_2_big_14.jpg)
/smartmap_2_14.png)
/smartmap_2_big_15.jpg)
/smartmap_2_15.png)
/smartmap_2_big_16.jpg)
/smartmap_2_16.png)
/smartmap_2_big_17.jpg)
/smartmap_2_17_2.png)
/smartmap_2_big_18_2.jpg)
/smartmap_2_18_2.png)
/smartmap_2_big_19_2.jpg)
/smartmap_2_19._2.png)
/smartmap_2_big_20_2.jpg)
/smartmap_2_20.png)
/smartmap_2_big_21.jpg)
/smartmap_2_21.png)
/smartmap_2_22.png)
/smartmap_2_23.png)
/smartmap_2_24.png)
/smartmap_2_25.png)
/smartmap_2_26.png)
/smartmap_2_27.jpg)