최소한이 동력으로 모든 수심에서 수중 글라인더 운영
압력 평형이 이뤄지도록 보상하는 시스템 채택
[헬로티]
한국해양과학기술원이 압력 평형 장치를 가지는 부력 조절 장치와 이를 이용한 수중 글라이더 및 압력 평형을 이용한 부력 제어 방법을 개발했다.
박요섭 책임기술원을 주축으로 한 한국해양과학기술원 팀이 개발한 부력 제어 방법은 수중을 수직 강하 및 상승하면서 관측하는 운동을 제어하기 위한 부력 조절 장치, 부력 제어 방법 및 이를 이용한 수중 글라이더에 관한 내용을 담고 있다.
이 기술은 최소한의 동력을 사용하면서 모든 해양의 수심에서 수중 글라이더의 운영이 가능하다. 또, 압력 평형이 이루어지도록 보상하는 시스템을 채택함으로써 어떠한 수심에서도 동일한 힘으로 부력을 조절할 수 있다.
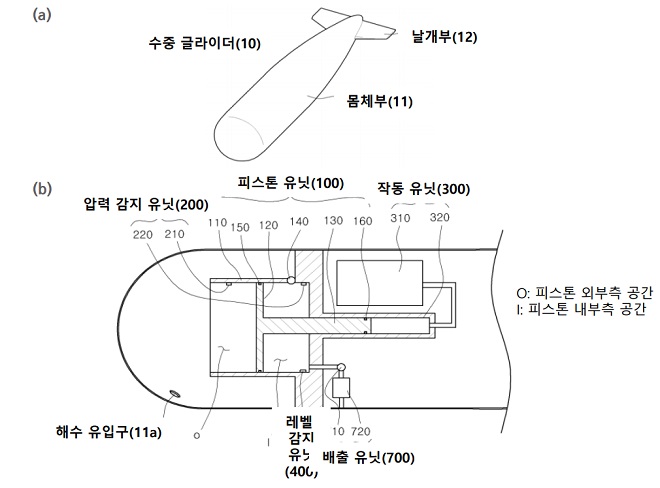
▲ 수중 글라이더(a)와 부력 조절 장치(b)의 도면 모습.
◆ 왜 필요한가?
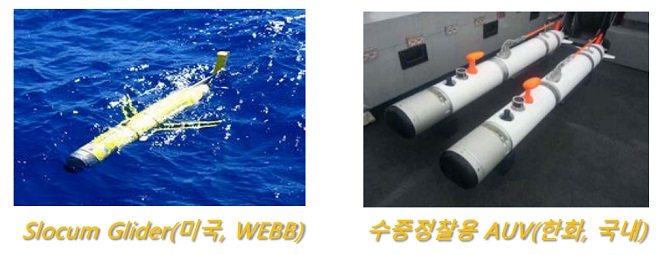
최근, 해양과학에서는 장기적이고 전 해수 층(최대 11000m)에 대한 모니터링이 가능한 플랫폼 개발을 추진하면서 수중 글라이더가 새롭게 개발 사용되고 있다.
수중 글라이더가 사용하고 있는 피스톤 방식의 부력 조절 장치 때문에, 최대 운영 가능 심도는 1500m로, 최대 수심(11000m)의 13%정도만 탐사가 가능하다. 따라서, 최소한의 동력을 사용하면서 모든 해양 수심에서 운영 가능한 부력조절 장치가 필요한 상황이었다.
◆ 기술의 차별화 요소는?
이번 기술은 최소한의 동력을 사용하면서 모든 해양의 수심에서 수중 글라이더의 운영이 가능한 점이 특징이다. 또한, 압력 평형이 이루어지도록 보상하는 시스템을 채택함으로써 어떠한 수심에서도 동일한 힘으로 부력을 조절할 수 있는 점도 차별화됐다.
‘2020 해양수산 기술사업화대전’에서는 본 기술을 포함한 다양한 해양수산 분야의 우수기술과 제품 정보가 확인가능하며, 기술 연구자와 온라인 상담을 진행할 수 있도록 1:1 상담 프로그램을 제공한다. 자세한 사항은 행사 홈페이지를 통해 확인할 수 있다.
▲ 이번에 개발한 부력 제어 방법은 연구선, 무선 표류 부이, 무인수중 탐사체 등의 라그랑지안 방식의 플랫폼 분야에 적용할 수 있다.




