[첨단 헬로티]
최근 산업용 로봇의 사용법이 변화해 왔다. 머티어리얼 핸들링이나 용접이 대부분을 차지해 왔는데, 최근에는 회전공구를 사용한 밀링을 하는 케이스가 증가했다. 이상은 높고 NC 공작기계를 대신해 로봇으로 정도 좋은 밀링을 할 수 있지 않을까 기대를 하고 있는 분도 많을 것이다. 그러나 여기서 확실히 말하면, 로봇‘만으로는’ 공작기계를 대신하지 못한다.
그 이유는 무엇인가? 로봇은 반복 정도는 있지만, 이동 간의 직진 정도가 없기 때문이다. 이것은 구조상 6개의 모터를 구사해 직선운동을 만들려고 하고 있기 때문에 당연하다. 직동축의 NC 공작기계와 비교해서는 안 되는 것이다. 또한, 구조상의 문제 외에 산업용 로봇의 성장 배경으로부터 보아 조금이라도 시간을 단축하고 생산량을 높이기 위해 정도보다도 속도를 우선시하기 때문에 이동 간은 애큐러시(정확도)에 의해 매끄럽게 동작하므로 불필요하게 정도는 내지 않는 것이다.
여러분은 손에 볼펜을 쥐고 종이에 직선을 그리는 것이 가능합니까? 누구 한사람도 정확한 직선을 그리는 것은 불가능하듯이 그렇게 로봇은 ‘사람의 손’과 마찬가지이다.
로봇은 사람의 ‘손’을 대신하게 된다
‘손에 볼펜을 쥐고 종이에 직선을 그려 주세요. 단 도구를 사용해도 좋습니다.’ 이렇다면 어떤 사람이나 정확한 직선을 그릴 수 있다. 그 도구가 ‘자’라면 직선의 길이도 정확하게 그릴 수 있는 것이다. 앞에서 ‘로봇만으로는 공작기계를 대신하지 못한다’고 했는데, 로봇은 ‘자’를 사용함으로써 그 가능성을 넓힐 수 있다.
‘자’로 비유했지만, 조금 구체적으로 소개한다. 우선은 하드웨어면에서 본다.
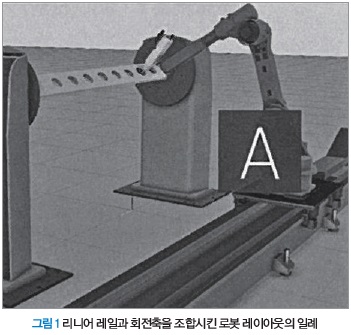
로봇이 리니어 레일 상에 타고, 주행축으로서 사용되면 직진 정도가 향상된다. 회전축도 이용해 로봇의 동작을 가급적 최소한으로 하고, 강성을 유지하는 것이 가능한 자세로 한다. 이렇게 부가축을 갖게 하는 방법이 있다(그림 1).
기타로는 프로그래머블한 예로서, 레이저나 카메라로 목표가 되는 워크의 에지 또한 금긋기 등의 마커를 트래킹하면서 로봇이 위치를 보정하는 방법이다.
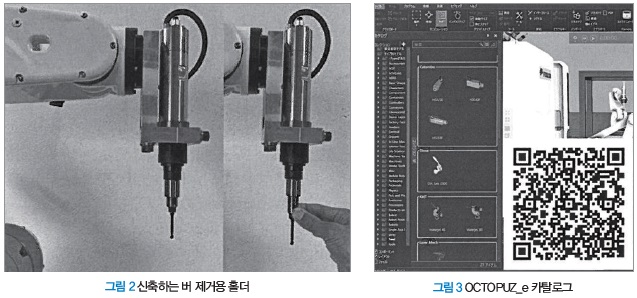
이것과는 정반대로 메커니컬한 예로서, 스프링 등으로 신축하는 홀더에 툴을 장착, 워크를 밀어붙여 따르게 하는 방법도 있다. 대부분은 로봇의 버 제거가공에 이용되는 방법이다(그림 2).
이와 같은 하드웨어면의 ‘자’를 잘 사용하는 것은 시스템 인테그레이터의 일이며, 시스템 인테그레이터의 실력을 보여줄 수 있는 기회이기도 하다. 아이템의 풍부한 지식, 발상력과 개발력이 불가능한 것을 가능하게 하는 것이다.
구현화하기 위해 필요한 소프트웨어
필요한 아이템을 구매해 준비하고, 이제 조립해 보자. 그러나 조립해 보면 부품과의 간섭이 있다, 생각한 것보다 사이즈가 맞지 않는다, 로봇이 목표점까지 닿지 않는다 등 시스템 인테그레이트하는 사람이라면 적잖이 경험하는 일일 것이다. 부품을 다시 구매해 개량한다. 시간과 공수와 비용이 불필요하게 들게 된다. 여기에서 소프트웨어가 담당하는 ‘자’에 대해 이야기하려고 한다.
기계 설계에서 이용되는 CAD 등을 이용하면, 로봇의 가동 범위를 베이스로 필요한 엔드 이펙터나 지그, 부대설비품의 레이아웃 등을 치수로 지시하고, 검토를 할 수 있다. 그러나 2차원 CAD는 ‘안길이’를 인식하기 어려운 부분이 있으므로 입체공간도 파악하기 위해서는 3D CAD를 사용하는 것이 최선이다. 더구나 시뮬레이션을 작성할 수 있으면, 보다 확실하게 된다. 단, 여기에 이르기까지는 기계 부품을 3D 모델링하고, 거기에 가동축 구조를 넣는 등 상당한 기량과 시간이 필요하게 된다.
여기서 산와로보틱스가 취급하고 있는 로보틱스 애플리케이션 ‘OCTOPUZ(옥토퍼즈)’에 대해 소개한다. OCTOPUZ는 e 카탈로그라고 하는 기능이 있다. 각 브랜드의 로봇 모델이나 그리퍼, 컨베이어, 피더, 테이블, 안전펜스 등 다양한 3D 모델을 다운로드할 수 있다. 로봇 모델은 관절축으로 움직일 수 있고 그리퍼는 개폐하며, 컨베이어는 워크를 보낼 수 있다. OCTOPUZ로 다운로드한 3D 모델은 이미 가동축 구조가 들어가 있다. 그 3D 모델을 이용해 즉시 레이아웃 작업을 진행할 수 있다.
그림 3의 2차원 바코드를 스마트폰의 카메라 기능으로 판독하면, 상세한 동영상을 볼 수 있다. CAD로 해야 하는 작업이 이미 완성되어 있다고 생각하면 좋을 것이다. CAD의 작업으로 필요한 공수를 한 번에 줄일 수 있다. 그리고 시뮬레이션도 동시에 작성할 수 있다. OCTOPUZ는 2종류의 시뮬레이션이 있다. 하나는 OCTOPUZ가 로봇의 동작을 자동으로 작성하는 방법이다. 그림 4의 2차원 바코드로부터 동영상을 보면 이해할 수 있겠지만, A지점에서 B지점으로 반송하는 등의 핸들링으로 복잡한 티칭이 필요하지 않은 시스템이면 매우 유효하게 된다. 단, 이 방법은 티칭 프로그램으로서 출력할 수 없다.
또 다른 하나는 티칭 데이터를 작성해 로봇을 시뮬레이션하는 방법이다. 머티어리얼 핸들링이나 용접 등 OCTOPUZ의 프로그래밍 기능으로 티칭 데이터를 작성할 수 있다. 이 방법이라면, 티칭 프로그램을 출력할 수 있다. 그리고 곡면을 따르는 복잡한 티칭 데이터를 작성하기 위해 CAM으로 작성한 NC 프로그램을 임포트하는 기능도 있다. 그림 5의 2차원 바코드로부터 동영상을 보기 바란다. 이 CAM 임포트를 포함해 오프라인 티칭은 소프트웨어가 담당하는 ‘자’가 된다.
로봇은 NC 공작기계와는 달리 정확한 수치 제어가 불가능하다고 앞에서 설명했는데, 티칭 펜던트로 ‘X 플러스 방향으로 100mm 움직여라’고 하는 지령은 불가능하다. 그러나 오프라인 티칭 소프트웨어에서는 수치로 로봇을 동작시키는 것이 가능하다. 정확한 좌표값을 구할 수 있고 또한 복잡한 동작의 티칭을 만드는 것은 소프트웨어이기 때문에 가능하며, OCTOPUZ는 로봇을 정확하게 움직이기 위한 가장 좋은 ‘자’가 된다.
만들어내는 것과 전하는 것
OCTOPUZ는 레이아웃 구상․설계, 팩토리 시뮬레이션으로서의 사용법과 오프라인 티칭 소프트웨어로서의 사용법 등 2가지 사용법이 있다. 특히 레이아웃 구상․설계 등은 상대에게 ‘전하기’ 위한 툴이 필요하다. 예전부터 있는 툴이라고 하면, 종이의 2차원 전개도면이다. 20년 전부터 ‘종이가 없는 시대가 온다’고 해왔는데, 아직 없어지지 않았다. 오히려 앞으로도 필요한 아이템이 될 것이다. 3DCAD로 3D에서 2D 도면으로 전개하는 기능은 일반적으로 존재하는 기능이다. OCTOPUZ도 3D 모델로 레이아웃 작성한 것을 2차원 전개도면으로 할 수 있다. 전개한 도면은 치수를 더해 DXF 파일로서 출력하거나, PDF 도큐먼트화하거나, 그대로 인쇄하거나 할 수 있다.
그 외에도 OCTOPUZ에는 다양한 ‘전하기’ 위한 툴이 있다. 우선은 최근에는 3DCAD에도 탑재되고 있는 3DPDF이다. 도큐먼트 파일이면서 3D 모델을 마우스 컨트롤로 원하는 시점에서 볼 수 있다. OCTOPUZ에서 출력되는 3DPDF는 시뮬레이션을 PDF로 하므로 Adobe Reader가 인스톨되어 있는 PC라면, OCTOPUZ로 작성한 팩토리 시뮬레이션을 볼 수 있다. 치수가 들어간 2차원 도면과 시뮬레이션이 들어간 3DPDF가 있으면, 사이즈감도 움직임도 상대에게 전할 수 있다.
작성 방법은 모두 1클릭 작업이 된다. 그림 6의 2차원 바코드로 동영상을 보기 바란다. 이 동영상의 마지막에 소개하고 있는 부분에서 포착이 있다. OCTOPUZ는 전용의 포맷 파일을 생성함으로써 태블릿 PC나 스마트폰 등으로 팩토리 시뮬레이션을 볼 수 있다. 앱은 무상으로 다운로드 가능하다. 이 앱은 Windows의 PC에서도 동작이 가능하다. windows판 앱에서는 시뮬레이션 파일을 실행하면, ‘Lunch 3D’와 ‘Lunch VR’의 2종류의 기동을 선택할 수 있다. VR(가상현실)로 팩토리 시뮬레이션을 볼 수 있다(그림 7).
VR과 AR(확장현실)은 지금 주목을 받고 있는 기술이다. 양쪽 모두 게임 소프트웨어에서 취급되고 있는 이미지인데, 산업이나 교육의 장에서 이용이 확대되고 있다. 예를 들면 위험 구역의 작업을 안전 지역에서 VR 혹은 AR을 사용해 작업 확인한다, 먼 곳에 소재하는 기업, 유저 등에게 작업 환경을 전하기 위한 활용, 기재의 조작 강습 등 그 활용 내용은 다양하다. 이들은 ‘전하기’ 위한 강력한 아이템으로 앞으로도 발전해 갈 것이다.
로봇의 가능성을 넓히는 소프트웨어
PC는 다시 말해 고도의 계산기이다. 오프라인 티칭 소프트웨어가 로봇의 가능성을 넓힐 수 있는 이유로서는 복잡한 자세나 많은 좌표점군을 단시간에 계산하고, 수치화할 수 있는 것에 있다. 일반적인 오프라인 티칭 소프트웨어는 좌표의 산출과 로봇의 시뮬레이션을 볼 수 있다. 간섭, 축 리밋, 언리치, 특이점 등 로봇이 안고 있는 문제점을 고려해 산출한 좌표, 로봇 자세를 보정해 가장 좋은 티칭 데이터를 만들 수 있다.
또한, 오프라인 티칭 소프트웨어를 이용하는 장점으로서 프로그램 정도의 균일화에도 크게 공헌할 수 있다. 예를 들면 A씨는 베테랑, B씨는 신입일 때, 티칭 펜던트에 의한 로봇 교시를 A씨와 B씨가 하면 결과에 차이가 나는 것은 상상할 수 있을 것이다. 소프트웨어를 사용하면 A씨도 B씨도 동일한 정도의 프로그램을 작성할 수 있다. 단, 오프라인 티칭 소프트웨어를 사용함으로써 고려해야 할 문제도 실제로는 존재한다.
우선 로봇의 컨트롤러는 큰 데이터(교시점 수가 많다)를 처리할 수 없다. 어떤 메이커의 로봇은 교시점 수 1000포인트까지라든가 5000포인트까지라든가, 옵션을 붙이지 않으면 처리가 불가능하다거나 로봇 메이커마다 각각 다른데, 대부분은 대용량 데이터를 잘 처리할 수 없다. 이것은 로봇의 성장 배경에 의한 것으로, 원래는 단순한 작업을 반복하기 위해 로봇을 이용하고 있었던 것으로, 그러한 대량의 티칭 데이터를 처리하는 일을 로봇에게 시키지 않았기 때문이다.
티칭 펜던트로 로봇을 교시하는 작업은 100포인트 교시하는 것도 매우 힘든 작업이다. 그러나 오프라인 티칭 소프트웨어로 곡면을 따르는 동작을 작성하면, 즉시 100포인트 이상의 교시점을 작성하게 된다. 이 점에 관해서 OCTOPUZ에서는 교시점 수의 리밋을 설정, 자동적으로 서브 프로그램으로 분할해 복수의 파일을 CALL로 연결함으로써 이 문제를 피할 수 있다. 그림 8은 티칭 포인트가 25098점 있고, 분할한 파일은 34개가 된다. 교시점 수가 적은 파일을 연결해 운전하면, 대용량 데이터라도 처리할 수 있다.
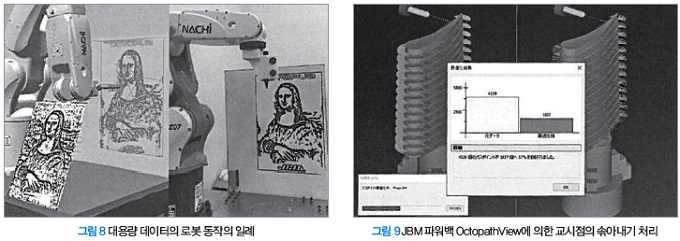
또 다른 하나의 문제로서 로봇의 컨트롤러는 교시점의 룩 어헤드 처리가 3~5행이기 때문에 작은 점군 데이터가 되면, 컨트롤러의 처리가 따라가지 못해 동작이 지연되고 매끄럽게 움직일 수 없게 된다는 것이다. CAM으로 툴패스를 작성하면, 큰 점군량을 산출한다. NC 공작기계는 정도가 좋은 가공을 하기 위해 작은 점군의 프로그램은 피할 수 없다. 그러나 NC 공작기계의 컨트롤러는 많은 프로그램 행을 룩 어헤드 처리할 수 있으므로 동작 지연을 발생시키지 않고 매끄럽게 움직일 수 있다. 이것이 NC 공작기계와 로봇의 큰 차이가 된다. 그러므로 이 문제에 대해 제이비엠은 OCTOPUZ에 독자의 옵션을 추가하고 있다. CAM에서 산출한 작은 점군 데이터를 허용 범위 내에서 ‘솎아내기’하는 것이 가능하다. 또한 원호 동작으로 변환함으로써 점군량을 줄일 수 있다(그림 9).
약간 점군의 거리가 넓어도 애큐러시의 조정으로 잘 이어갈 수 있다.
이와 같이 로봇의 특징을 잘 파악함으로써 오프라인 티칭을 ‘자’로서 사용할 수 있는 것이 OCTOPUZ인 것이다.
로봇 티칭 애플리케이션 OCTOPUZ
OCTOPUZ는 팩토리 시뮬레이션과 오프라인 티칭의 양쪽을 할 수 있다. 로봇을 사용한 시스템을 만들 때 OCTOPUZ는 가장 좋은 ‘자’로, 장래에 생겨날 새로운 기술에 대응하기 위해 앞으로도 진화를 계속해 갈 것이다.
OCTOPUZ와 같은 소프트웨어가 로봇을 활용하는데 있어 반드시 필요한 ‘도구’라는 것을 여러분이 느낄 수 있으면 좋겠다.
타카노 히데유키, 제이비엠 동일본기술부 기술부장




