[첨단 헬로티]
스텝퍼 모터는 정밀한 모션 제어에 널리 사용되는 기법이다. 표준 DC 모터는 연속적으로 회전하는 것과 달리, 스텝퍼 모터는 축을 중심으로 한 번에 한 스텝씩 회전할 수 있다. 그러므로 정밀한 포지셔닝과 속도 제어를 필요로 하는 애플리케이션에 적합하다. 하지만 모든 동작 지점으로 모터 제어가 정밀하게 이루어지도록 하기 위해서 모터와 컨트롤러를 튜닝해야 한다.
통상적인 스텝퍼 모터는 고정자, 샤프트에 부착되는 회전자, 고정자를 둘러싸고 고정된 위치에 부착되어서 자기장을 발생시키는 일련의 코일 권선으로 이루어진다. 영구 자석 스텝퍼 모터의 회전자는 자성 소재의 원반을 사용한다. 이 원반은 2개 극만을 사용할 수도 있고, 정밀 모터에 사용되는 좀더 복잡한 것은 더 많은 수의 극을 사용할 수도 있다. 이와 달리 가변 릴럭턴스 스텝퍼 모터는 전적으로 전자기이다.
모터로부터 전원을 제거하면 외부적 힘에 의해서 회전하게 된다. 영구 자석 모터는 모터로 전원을 인가하면 회전자가 가장 안정적인 위치를 찾는다. 코일로 발생된 전자기장이 회전자로 형성된 마그넷의 한쪽 극은 끌어당기고 다른 쪽 극은 밀쳐낸다. 마그넷 상에서 가장 가까운 반대 극이 코일로 생성된 전자기장과 정렬하면 회전자가 정지하고, 코일의 전자기장이 변화할 때까지 계속해서 그 자리에 멈춰 있는다. 이 코일에서 전류 흐름이 제거되고 다른 위치의 다른 코일로 인가되면 마그넷이 그 다음 안정적인 위치로 끌어당겨진다.
통상적으로 가변 릴럭턴스 모터는 고정자로 반대되는 쌍으로 구성된 일련의 코일들을 사용할 수 있다. 3위상 모터는 3개의 이러한 쌍을 사용한다. 각각의 코일 쌍으로 에너지를 가함으로써 금속성 회전자를 한 스텝씩 움직일 수 있다.
그런데 기계적 한계 때문에 회전자는 특정 최대 속도까지 회전할 수 있다. 모터의 토크는 속도가 낮을 때 최대가 된다. 그러므로 최대의 제어와 토크를 위해서 모터를 흔히 낮은 속도로 사용한다.
마이크로스텝핑을 사용해서 분해능을 높일 수 있다. 보통의 동작은 한 코일에서 전류가 완전히 제거되지 않고서 다음 코일을 활성화하게 된다. 한 코일에서 전류가 줄어드는 동안에 다른 코일로 전류가 높아진다. 그러므로 단속적인 전류 전이로 모터를 구동하는 것이 아니라, 두 코일로의 이러한 전류 공유를 제어함으로써 실제적으로 좀더 세밀한 스텝을 제공할 수 있다.
이론적으로 90° 위상 편이로 2개 사인파 신호를 사용해서 매끄러운 연속적 모션을 제공할 수 있다. 하지만 실제로는 파형들이 완벽하게 사인파가 아니다. 각각의 위치로 코일의 전류 레벨이 단속적이다. 마이크로스텝핑은 풀 스텝으로 작동하는 것과 비교해서 모터로 더 매끄러운 모션을 달성하고 잡음과 진동을 낮출 수 있다. 하지만 정밀한 제어를 유지하기 위해서 모터로 정밀한 전류 제어가 중요하다. 특히 낮은 속도일 때 더 그렇다. 예기치 않은 마이크로스텝 누락이 발생될 수 있기 때문이다.
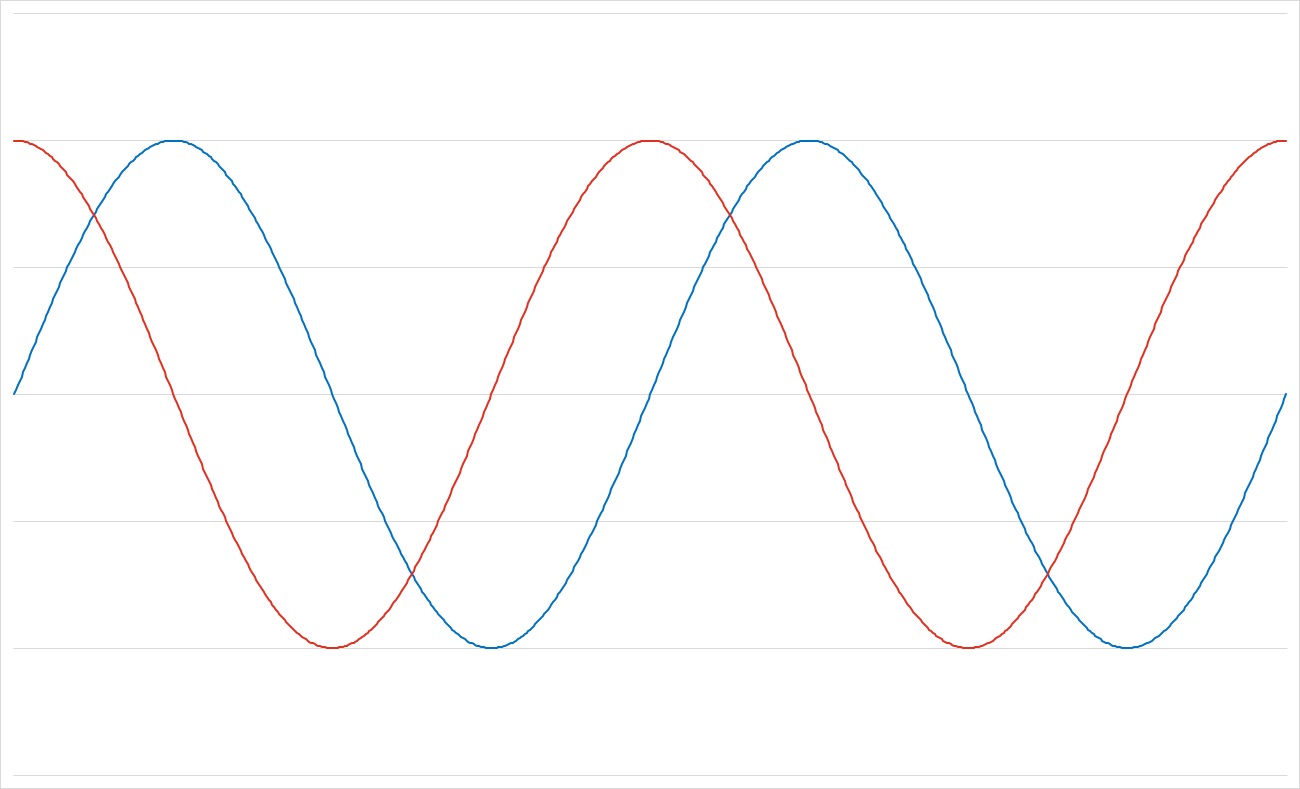
그림 1: 스텝 사인파 파형 쌍을 사용한 마이크로스텝핑 제어
글 / 마크 패트릭(Mark Patrick) 마우저 일렉트로닉스(Mouser Electronics)




