|최우수상| 서울과학기술대학교 델타포스 ‘틸팅 스테이지를 활용한 다축 델타 로봇’
서울과학기술대학교 _ 김성환 교수, 남지인 학생

Q. 먼저 이번 공모전 최우수상 수상에 대한 소감 한 말씀 부탁 드립니다.
김성환 교수 - 제가 지도하는 학생이 이번 공작기계 창의 아이디어 공모전에서 값진 상을 받게 돼 가르치는 사람으로써 큰 보람을 느낍니다.
저는 본 학교의 졸업작품 관련 수업인 캡스톤 작품과 CK-II 사업인 ‘다빈치로봇사업단’의 활동과 겸하여 지난 4년간 지도를 해오고 있는데요. 매년 공작기계 공모전에서 상을 수상하게 되었고 비교적 짧은 시간에 그 결실을 확인하게 되었습니다. 열심히 해준 학생들에게 가장 고맙습니다.
남지인 학생 - 저희는 학교에서 진행하는 ‘전학기 설계 기반 학습(ADBL, All-Semester Designed Based Learning)' 프로그램에 따라 2학년 때부터 하나의 프로젝트를 가꾸어 나갑니다. 2년 여간 한 작품에 열정을 쏟다보니 남다른 애착이 있었는데, 이렇게 큰 상을 받게 되니 보람이 더 컸습니다.
Q. 이번 수상 기술인 ‘틸팅 스테이지를 활용한 다축 델타 로봇’에 대해 소개 부탁 드립니다.
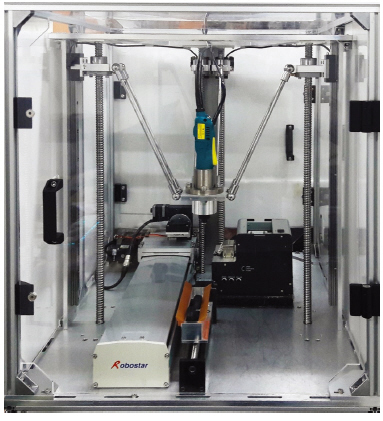
김성환 교수 - 이번 작품은 '기울어지면서 직선 이송'되는 작업물을 ?아가면서 나사 조립하는 로봇입니다. 보통은 나사를 체결한 후 이송하는 방식인데 이송과 조립을 동시에 진행토록 한 것이죠. 이를 산업계에 적용하면 소요시간(Tact Time)을 그만큼 줄일 수 있기 때문에 큰 가치가 있다고 생각합니다.
Q. 작업물 이송과 조립을 동시에 한다는 것이 특징인데요. 여기에는 어떤 기술이 적용되었나요?
남지인 학생 - 이번 델타 로봇은 작업물이 병진 운동 및 회전 운동을 동시에 하도록 단축로봇과 틸팅 스테이지를 이용해 작업물을 이송하는데요. 이를 위해 병렬기구 형태의 로봇을 설계하였습니다. 그리고 원하는 모션을 할 수 있도록 최적화된 링크 길이로 설계하였고 매 연속 이송 위치마다 적절히 제어되도록 역기구학을 풀어 모터 위치를 계산하였으며 6개의 모터가 동기제어되면서 직선 보간되도록 제어하는 고급 프로그램을 개발하였습니다.
Q. 설명을 보니 3축 델타로봇을 4축 기구로 확장시켰다는 점이 특징인데요. 이 변화가 정확히 어떠한 장점이 되는지요?
김성환 교수 - 3축 델타로봇은 최근 많이 사용되고 있는 것 같습니다. 잘 알려진 바와 같이 3축 로봇은 XYZ방향의 직선 이동만 가능합니다. 하지만 우리가 하려는 작업을 위해서는 로봇에 부착된 전동 드라이버가 직선운동을 하면서 직선운동 방향에 직각으로 기울어져야 합니다. 이를 위해서는 최소 4축을 가져야 하는데, 임의의 4축을 가져서는 안 되고 적절한 위치에 모터 축을 가져야 합니다. 이를 모두 해결한 것이 이 작품입니다.
Q. 기존에 있는 유사한 기술과 비교했을 때 어떠한 차별점이 있는지요?
김성환 교수 - 일단 이동 물체를 따라가면서 조립하는 것은 매우 고가의 범용 로봇을 사용해야 하는 이유로 실제 산업현장에 거의 채택되지 않고 있는 것으로 알고 있습니다. 이 기술은 합리적인 비용과 택타임을 획기적으로 줄일 수 있다는 것이 차별점입니다.
Q. 이 기술에 대해 업계에서의 평가는 어떤가요? 특히 CES 2018에도 출품한 것으로 알고 있는데요. 현장 반응이 궁금합니다.
김성환 교수 - 저렴한 비용으로 택타임을 줄일 수 있으므로 생산성 향상을 목표로 하는 업체들은 많은 관심을 가집니다. 실제 이 기술은 개선해 작업 환경에 적용하는 것을 검토하고 있는 업체들도 있습니다.
남지인 학생 - 일반적인 제품은 아니기 때문에 CES에서도 델타로봇에 대해 잘 알고 있는 사람들이 관심을 많이 가졌습니다. 이 로봇 분야 종사자들이다보니 4축으로 만든 것에 대해 궁금해하고, 5축으로 만들면 어떤가라는 질문을 주로 했습니다.
Q. 이번 기술 개발에 멘토 기업이나 공작기계협회의 역할도 컸을 것 같은데요?
남지인 학생 - 저희 멘토 기업이 하이젠모터인데요. 마침 창원 연구소에서 저희 작품과 유사한 기술을 개발하고 있었습니다. 그 덕분에 로봇 제어에서부터 안정적인 구동을 위한 프로그램 구축까지 여러 도움을 받았습니다.
공작기계협회에서는 멘토 기업과 회의를 하고 기술을 발전시켜 나가는 데 계속해서 관리를 해주었습니다. 특히 심사 과정이 인상적이었는데요. 심사위원들이 현업에 종사하는 분들이기 때문에 저희 기술에 대해 어떤 부분을 개선해야 현장에 더 잘 적용될 수 있는지를 알려줘서 기술과 산업을 보는 시야도 한층 넓어졌습니다.
Q. 이 기술에 대한 앞으로의 계획은 무엇입니까?
김성환 교수 - 이 컨셉을 여러 형태로 변형할 수 있습니다. 다음 캡스톤 작품에서는 이동하는 PCB에 5축 디스펜싱을 수행하는 기술을 개발하려고 계획하고 있습니다.
<본 기사는 Machine & Tool (2018년 2월호) 기사입니다>




