로봇이 융합 서비스화로 더 이상 제조 생산에만 머무르지 않고 새로운 신규 시장을 개척하고 있다. 최근엔 새로운 형태의 로봇으로서 양팔 로봇과 모바일 로봇이 주목받고 있다. 양팔 로봇은 단팔 로봇이 못하는 넓은 작업 영역을 커버하며 복잡한 조립과 포장, 인간과의 협업 작업에 응용될 것으로 기대되고 있다. 병원 물류 운반을 위해 상용화한 모바일 로봇은 자동창고와 연계하여 제조업 현장에서 사용하거나 공공장소의 서비스 용도로도 활용이 예상된다.
우리나라가 자동차 산업을 시작으로 제조업용 로봇을 도입한 지 30여 년, 국가 성장동력산업으로 로봇기술 육성에 나선 지도 10년이 지났다. 그동안 로봇 기반기술과 응용기술 면에서 많은 발전이 있었다.
많은 사람이 금방은 아니더라도 로봇기술을 잘 활용하면 한국 제조업의 경쟁력을 높일 수 있고, 저출산과 고령화로 대표되는 한국 사회의 문제를 해결할 수 있지 않을까 기대하고 있다. 이 글에서는 제품 사례를 들어가며 로봇기술과 산업의 현주소를 알아본다.
로봇산업의 발전 경위
로봇기술은 1960년대 미국에서 태동하여 1980년대 일본과 EU에서 제조업용 로봇을 중심으로 크게 성장했다. 이후, 일본과 EU의 로봇회사들이 제조업용 로봇 시장을 장악하게 되었으며, 일본의 야스카와전기, 화낙, EU의 ABB, KUKA 등이 대표기업이다.
우리나라는 1980년대 말 뒤늦게 로봇기술 개발 경쟁에 뛰어들었으나, 국산화의 기반 마련이 성공적이지 못하여 해외 선진 로봇에 대한 의존도가 높고 시스템 응용 기술도 제한적인 실정이다.
2004년부터 정부 주도로 R&D 투자가 이루어지면서 다양한 기술 축적이 있었으나 규모 있는 신규 시장 창출로 이어지지 못하고 있다. 현재, 국내 로봇산업은 기대에 비해 성장이 더딘 편이지만, 로봇기술에 대한 국민들의 기대는 여전히 높은 편이다. 국내 산업이 제조업 중심으로 발전하고 사회 구조도 저출산, 고령화 기조를 유지한다면 로봇의 잠재 수요는 더욱 커질 것이다.
로봇기술의 모듈화와 융합 서비스화
로봇산업은 로봇 팔 제품을 중심으로 자동차·기계·전자 분야에서 용접, 도장, 핸들링 등의 공정에 널리 사용되며 발전했다. 로봇 팔 제조사들은 기구, 제어, 시스템까지 자사에서 모두 생산하여 SI사와 협업하며 고객의 요구에 맞춘 커스터마이징 시스템을 공급한다. 이러한 비즈니스 모델은 상당한 폐쇄적으로 운영되어 이제는 로봇산업의 성장을 가로막는 장애 요인이기도 하다.
최근에는 기구, 제어기, 센서 등 로봇의 구성요소를 모듈화, 오픈화, 표준화하려는 움직임이 점차 활발해지고 있다. 이러한 움직임은 이미 시장을 선점하고 있는 메이저 회사들에게는 달갑지 않을 변화이다.
그러나 중국이 로봇 최대 시장으로 부상하면서 이러한 추세를 부추기고 있고, 메이저 회사들은 새로운 신규 시장을 개척하기 위해 자사에서 모든 것을 생산하는 방식을 더 이상 고수할 수 없게 되었다.
한편, 로봇의 제조 생산에만 머무르지 말고 로봇의 융합 서비스화와 새로운 가치 창출이 절실하다는 지적도 있다. 로봇이 하나의 시스템이 되기까지는 많은 SI(시스템통합) 기술이 필요한데 용접, 도장, 핸들링 등 몇몇 분야를 제외하고는 시스템 기획 능력이 매우 부족한 실정이다. 그만큼 로봇산업이 자동차, 반도체 등 기존의 고객에 의존하여 새로운 시장 창출을 게을리했다는 이야기이다. 아직 중견기업의 많은 수작업들이 로봇화되지 않은 현실을 생각해보면 제조업 분야에서 참신한 시스템 기획력이 요구된다. 제조를 벗어나 서비스까지 생각하면 단지 로봇을 만들면 누군가가 서비스해 주겠지 하는 안일한 생각은 새로운 시장을 만들지 못한다.
최종적인 제품과 서비스로 고객에게 다가가는 아이템이 어디 청소 로봇뿐이랴! 정부도 이러한 점을 인식하고 로봇융합포럼 등의 모임을 통하여 제조, 교육, 국방/사회/안전, 농축산, 문화, 의료재활, 해양/수산/건설/교통 등 타 분야와 로봇기술을 접목하려는 시도를 하고 있다. 그러나 융합서비스를 비즈니스 모델로 정착하기까지 많은 수업료를 내야 할 것으로 예상된다.
비전 검사를 위한 스마트 카메라와 3차원 비전
글로벌 경쟁이 격화되면서 종전에는 사람이 해오던 검사나 핸들링 작업을 로봇화하여 검사 효율을 높이려고 하는 기업이 늘고 있다. 비전 검사는 부품의 유무, 조립 오류 등을 찾아내는 초기 응용 단계를 벗어나서, 표면의 미세한 결함을 찾아내고 3차원 형상을 검사하는 영역으로 확대되고 있다.
비전 응용을 확대하기 위해서는 비전기술이 더욱 모듈화되고 사용하기 쉬워야 한다. 일반적인 FA 비전이 카메라, 조명, PC/PLC 등으로 구성되는 데 비해, 스마트 카메라는 이러한 것들이 일체화되고 가격이 저렴해지고 사용하기 쉬워졌다는 것이 장점이다.
스마트 카메라는 컨베이어에 흘러가는 부품의 검사, 인쇄 상태의 검사 등 아직은 비교적 간단한 응용에서 사용되고 있으나, 기술 향상으로 응용 범위가 넓어질 것이다. 그림 1은 병렬링크 로봇 시스템에서 컨베이어 위를 고속으로 흘러가는 대상물을 검출하는 스마트 카메라를 보여준다.
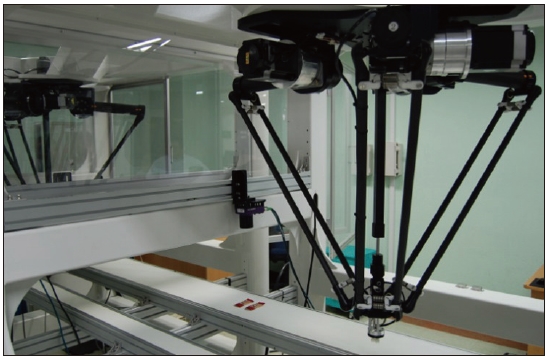
그림 1. 병렬링크 로봇과 스마트 카메라(가운데)
카메라 내에 프로세서와 소프트웨어가 이미 들어있어서 로봇 제어기와 이더넷으로 연결하는 것만으로 바로 사용할 수 있다. 검사 대상물의 모델 등록이 필요하면 모니터를 연결하여 조작하면 되는데 프로그래밍이 단순한 편이다.
3차원 비전 기술은 대상물의 3차원 정보를 계측하여 활용하려는 것으로서 정밀도와 처리 속도가 다양하다. 그림 2는 3차원 비전 기술을 이용하여 비정렬 상태의 박스를 흡착하여 컨베이어 위로 이동시키는 작업이다.

그림 2. 3차원 비전의 로봇 응용 (좌: 박스 팔레타이징, 우: 비정렬 부품 픽업)
또한, 부품 박스에 담겨진 비정렬 상태의 프레스 부품을 천정에 설치된 3차원 비전으로 고속 인식한 후 로봇의 집는 위치와 자세까지 결정하여 픽업하는 모습이다.
표 1은 2014년 야스카와전기가 캐논과 손잡고 출시한 3차원 비전 제품인 MotoSight3D의 사양이다.
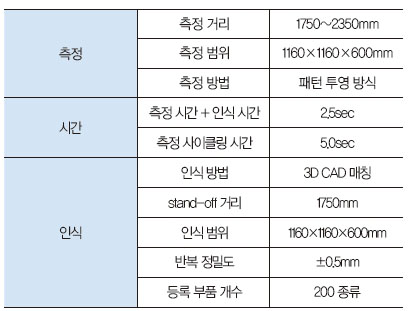
표 1. 야스카와전기의 MotoSight3D 사양
비교적 넓은 측정 범위를 커버하고 있으며 3차원 측정과 인식 속도가 2.5초로 빠르다. 2.5초 안에 로봇이 대상물을 흡착 이동할 수 있다면 5초 단위로 비정렬 부품을 핸들링 할 수 있다.
이러한 우수한 성능이 가능한 것은 대상물의 CAD 데이터를 이용하여 3차원 비전의 인식 한계를 극복하고, 대상물 등록 후에 학습 기능을 이용하여 인식 성능을 스스로 개선할 수 있기 때문이다.
새로운 6축 힘 센서와 힘 제어의 등장
현재의 로봇은 대상물이나 환경과 접촉하며 작업하는 것이 서투른데, 가장 큰 이유는 대부분 로봇이 힘 센서를 내장하고 있지 않기 때문이다. 보통은 로봇 끝에 다축 힘 센서를 부착하여 작업 시에 발생하는 힘과 회전력(모멘트)을 측정하여 로봇의 힘 제어에 사용한다. 힘 제어가 가능하면 접촉 작업 시에 딱 알맞은 힘만 준다거나, 사람이 로봇을 직접 잡아서 작업 경로를 알려주는 직접교시가 가능하다. 그림 3은 최근에 힘 센서 시장에서 가격 파괴를 주도하고 있는 6축 힘 센서인 DynPick과 이를 이용한 힘 제어 조립 로봇이다.
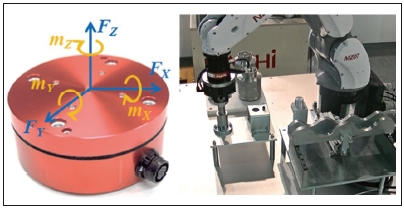
그림 3. 6축 힘센서의 검출 원리와 이를 응용한 힘 제어 조립 로봇
보다 정밀하고 고속의 힘 제어를 위해서는 금속 재질의 힘 센서 대신에 공압 밸브로 고속 압력 제어를 하는 방법을 사용한다. 그림 4는 이러한 압력 제어 로봇 ForceMate-ACF를 보여주는데, 사진과 같이 10N 이하의 미세한 힘을 3msec의 고속으로 제어할 수 있다.

그림 4. 정밀하고 고속의 연마/디버링 작업이 가능한 ForceMate-ACF
대상물의 형상 CAD 정보를 잘 모르더라도 연마, 디버링과 같은 고난도의 접촉 작업을 빠르게 수행할 수 있다.
PC 기반 제어
로봇 제어기(로봇 컨트롤러)는 언뜻 PC와 비슷해 보이지만, PC용 소프트웨어가 동작하는 환경이 아니다.
최근에 오픈소스 소프트웨어(OSS)를 웹에서 쉽게 구할 수 있게 되면서, 이러한 OSS를 로봇 제어기에 이용하려는 움직임이 활발하다. 로봇 제어기가 오픈화하여 OSS를 쉽게 적용할 수 있다면 로봇의 지능화도 가속화될 것이다.
그런 의미에서 일본 로봇업계의 로봇 미들웨어인 ORiN(오라인, Open Robot interface for the Network), 일본 DENSO WAVE의 개방형 제어기 MC8을 주목하게 된다. 그림 5에서 MC8는 윈도 OS에서 안정적으로 로봇 팔을 제어할 수 있고, PC와 고속 통신으로 통합 제어가 가능하고, 영상처리 소프트웨어 등 다양한 OSS를 탑재할 수 있다.
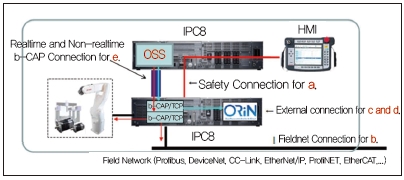
그림 5. 제조업용 로봇의 PC 기반 제어 구성(DENSO WAVE의 경우)
높은 안정성을 보유한 제조업용 로봇 제어기의 장점을 그대로 살리면서도 시스템 확장성과 오픈화를 구현했다.
신흥 시장을 위한 새로운 형태의 로봇
오래전부터 제조업용 로봇 시장이 수직다관절 로봇 팔, SCARA(수평 다관절 로봇)가 중심이 되다 보니, 다른 형태의 로봇은 기술도 비즈니스 모델도 크게 부족한 실정이다.
신흥 시장을 위한 새로운 형태의 로봇으로서 지난 수년간 가장 활발히 상용화되고 있는 것이 그림 1의 병렬 링크 로봇이다. 컨베이어 상의 포장과 선별에는 분당 120cpm의 고속 P&P(Pick and Place) 동작이 필요한데, 장시간 동작에도 문제가 없는 로봇이 바로 병렬 로봇이다.
현재 식품, 화장품, 제약 산업을 비롯하여 기계, 전자 분야에서 새로운 응용을 열심히 찾고 있는 중이다. NT리서치에서는 일본 DENSO WAVE와 손잡고 세계 최고 사양(6Kg 가반하중, 0.4초 사이클링 타임)의 병렬 링크 로봇 NPicker를 상용화했다.
그 밖에 그림 6에서 보듯이 양팔 로봇이나 모바일 로봇(이동 로봇)도 상용화가 크게 기대되는 기술이다.

그림 6. 양팔 로봇 DUPALRO과 모바일 로봇 Sbot
양팔 로봇은 단팔 로봇이 못하는 넓은 작업 영역을 커버하며 복잡한 조립과 포장, 인간과의 협업 작업에 응용될 것으로 기대되고 있다. 제조업 현장의 휴머노이드(인간형 로봇)인 셈이다. 실제로는 양팔 이외에도 핸드, 힘 센서, 로봇 비전, 운용 소프트웨어를 모두 갖추어야지 원하는 성능을 낼 수 있다. 물론 양팔로봇으로 어떤 작업을 할 것인지에 대한 시스템화 기술도 중요하다.
한편, 그림 6은 수년 전 NT리서치에서 병원 물류 운반을 위해 상용화한 모바일 로봇이다. 최근에는 자동창고와 연계하여 제조업 현장에서 사용하거나 공공장소의 서비스 용도로도 활용이 기대되고 있다. 로봇 앞면에 달린 3차원 비전으로 스스로 장애물을 인식하고 피하며, 환경 지도를 만들고 갱신하는 ‘자율 주행기술’이 핵심기술이다. 제조업 현장에서 용도를 찾는 한편, 휴대기기를 이용하여 간단하게 모바일 로봇을 부를 수 있다거나 사물 인터넷(IoT)과 연계하여 제어한다거나 하는 추가 개발이 진행 중이다.
맺음말
이제까지 로봇산업이 연구개발과 제조 생산에만 치중하였다면, 앞으로는 최종 소비자와 접촉면을 넓히면서 융합 서비스화를 지향해야 한다. 융합 서비스화를 통하여 신흥 시장을 개척할 수 있을 뿐만 아니라, 로봇 제품 자체의 부가가치와 고객 만족을 높일 수 있을 것이다. 이를 위해서는 융합산업에 대해 깊은 이해와 로봇 서비스에 대해 새로운 전략이 필요하다.
로봇산업은 한국의 성장동력산업 중에서 전방산업과 후방산업을 고루 갖추고 있는 거의 유일한 산업이다. 관련 업계의 분발이 절실히 요구되는 시점이다.
김경환 NT 리서치 (kimk@nt2004.net)




