
기존 PC 기반 컨트롤러는 특수한 기능에 유연하게 대응하기 위한 환경에서는 선택의 어려움이 있고 전자동화 시스템을 고수하고 있는 장비 콘셉트에 따라 점차 복잡해지는 제어 시스템에서는 한계를 드러낸다. 특히, 제어 모터의 수량이 많아지면 그만큼 모션 보드도 증가해야 하는 문제점이 있다.
따라서 통신형 모션 보드를 사용하거나 통신형 외장형 모션 컨트롤러를 사용해야 한다. 파익스는 외장형 모션 컨트롤러를 콘셉트로 PC와의 통신은 이더넷으로 연결하고 모터 제어용 드라이버는 펄스로 제어하는 방식을 취했다. 또한, 다양한 산업군에 적용할 수 있도록 연속 보간과 진동 최소화 등 성능을 더욱 개선했다.
모션 컨트롤러란

파익스 모션컨트롤러를 소개하기 전에 먼저 모션컨트롤러란 무엇인지, 어떠한 종류가 있는지, 구성 방법은 어떻게 되는지 등을 간략히 설명할 필요가 있을 것 같다. 우선 제어 방식으로는 크게 3가지로 구분할 수 있는데, 펄스로 위치 및 속도를 제어할 수 있는 펄스 제어 방식과 드라이버 또는 모션컨트롤러 제조사마다 보유하고 있는 고유의 통신 형태의 통신 제어 방식이 있고, DC 전압, SIN 신호, PWM 등의 신호로 모터를 제어하는 아날로그 제어 방식으로 나눌 수 있다.
펄스 제어 방식은 일반적으로 주변에서 쉽게 접하는 PLC의 위치결정 모듈이 그 역할을 한다고 볼 수 있다. 통신 제어 방식은 최근 이슈화되고 있는 이더켓 방식을 예로 들 수 있다. 아날로그 제어 방식은 잘 알려져 있는 D사, A사의 예를 들 수 있다. 이니셜만으로 쉽게 가늠할 수 있을 것이라 본다.
위와 같이 다양한 제어 방식이 있는 것처럼 컨트롤러의 제조사별 제품의 설치 방식도 다양하게 존재한다. 장비 제어용 PC 내부에 설치하는 PCI 보드 방식과 통신으로 제어하는 외장형 통신 방식 그리고 PC 연결 없이 독립된 형태로 제어 가능한 독립형 컨트롤러가 있다.
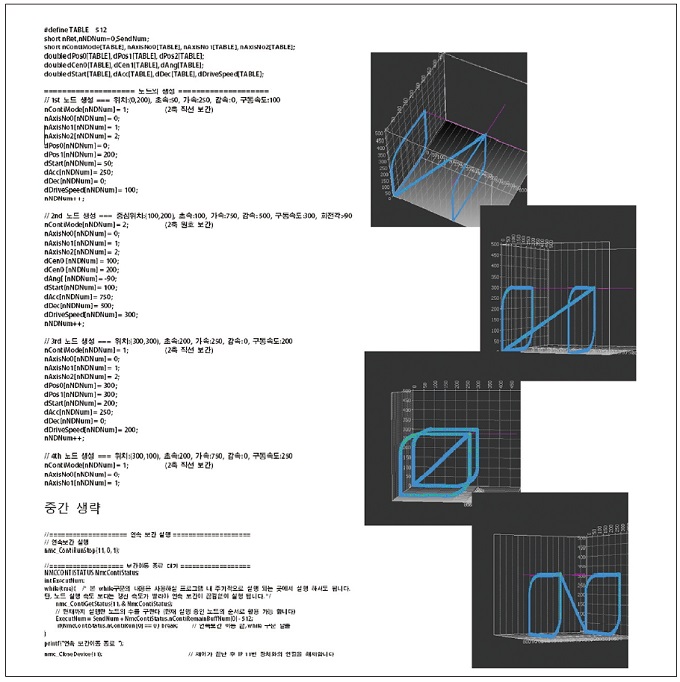
그림 1. 전체 노드가 512개 미만일 경우(좌)와 파익스 데포 프로그램에서 3D로 구현한 좌표 데이터 이미지
한 가지 오해의 소지를 불러올 수 있어 먼저 언급하자면, 소프트웨어 컨트롤러도 PC 내부의 통신 보드(칩)를 사용하여 제어하는 방식이므로 PCI 보드 방식으로 구분 짓겠다. 이러한 다양한 제어 방식과 설치 방식은 각각의 장단점을 가지고 있다. 물론 이 글을 쓰고 있는 필자는 파익스 제품이 다양한 모션 제어 관련 시스템에 사용이 가능하다고 말하고 싶지만 그렇지 않을 때도 있다.
고도의 기능을 요구하는 시스템에는 타사의 제품을 추천해야 하는 피치 못할 사정도 있다. 장비의 개발을 계획한 시간 안에 완성도 높은 장비개발이 우선이라고 생각하기 때문이다. 독립형 컨트롤러는 PLC를 예를 들 수 있다. PC를 사용할 수 없는 전장 구성과 C언어로 프로그래밍하지 못하는 사정상 흔히 사용하는 방식이다. 또한, 간단한 위치 제어와 속도 제어용으로 사용할 수 있다. 이것은 진화된 PLC 성능으로 인해 웬만한 PC 기반 컨트롤러의 기능을 충실히 수행한다.
하지만 특수한 기능에 유연하게 대응하기 위한 환경에서는 선택의 어려움이 있고 전자동화 시스템을 고수하고 있는 장비 콘셉트에 따라 점차 복잡해지는 제어 시스템에서는 한계를 드러낸다. PCI 보드 방식은 대표적인 PC 기반 방식으로 오래전부터 사용해 왔고 현재도 적용되는 장비가 많다. 하지만 장비의 콤팩트화에 따른 슬림 PC 및 팬리스 PC의 사용으로 축소된 PCI 슬롯에 비전 관련 보드를 장착하고 나면 모션컨트롤러 보드의 증설이 어려워진다. 특히 제어 모터의 수량이 많아지면 그만큼 모션 보드도 증가해야 하는 문제점이 있다.
따라서 통신형 모션 보드를 사용하거나 통신형 외장형 모션 컨트롤러를 사용해야 한다. 파익스는 외장형 모션 컨트롤러를 콘셉트로 PC와의 통신은 LAN(이더넷)으로 연결하고 모터 제어용 드라이버는 펄스로 제어하는 방식을 취했다. 펄스 제어 방식과 아날로그 제어 방식의 가장 큰 차이점은, 만약 모터의 회전 상태를 모니터링하여 고속의 속도로 동기 제어를 필요로 하는 시스템에서는 펄스 제어 방식으로는 무리가 있다. 하지만 이러한 특수 상황을 필요로 하는 시스템보다는 그렇지 못한 시스템이 훨씬 많다.
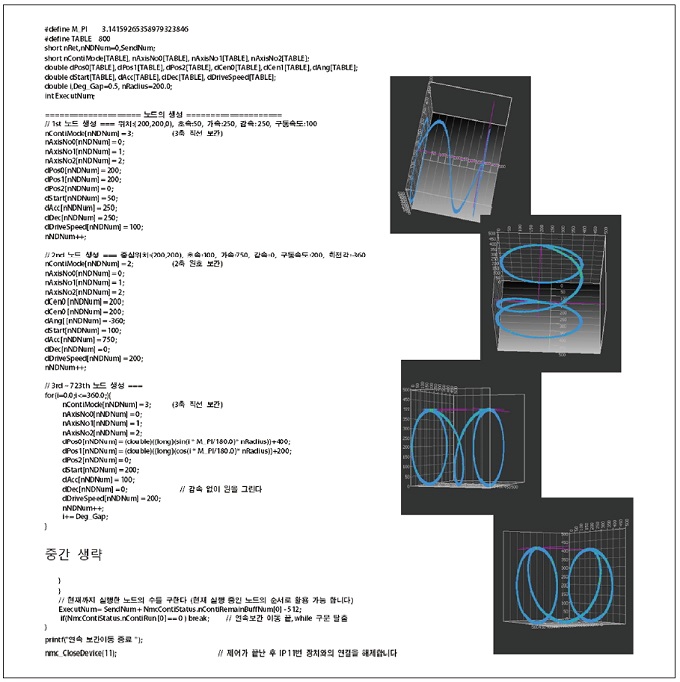
그림 2. 전체 노드가 512개 넘는 경우(좌)와 파익스 데모 프로그램에서 3D로 구현한 좌표 데이터 이미지
따라서 특수한 기능을 요구하는 일부 구성은 아날로그 컨트롤러를 적용하여 성능을 끌어 올리고 비교적 심플한 제어가 가능한 장비의 일부 시스템은 펄스 제어 또는 통신 제어를 혼합하여 설계하는 것이 장비 비용을 유지하는 데 도움이 될 것이다. 이것으로 모션 컨트롤러에 대한 간략한 설명을 마치고 파익스 외장형 이더넷(LAN)통신 컨트롤러를 소개하겠다.
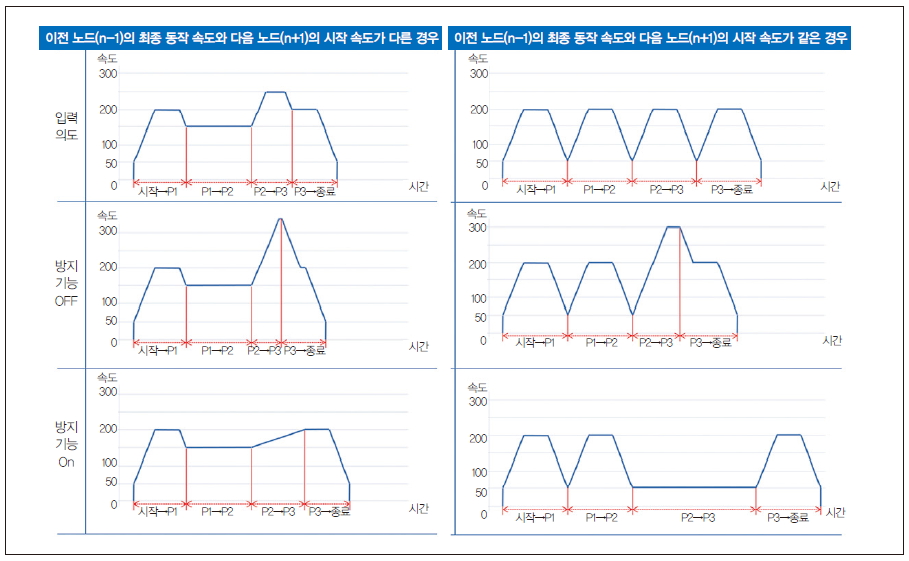
그림 3. 노드의 동작 속도가 다음 노드의 동작 속도에 미치는 영향을 나타낸 그래프
파익스의 제품 사례
2015년 상반기 파익스 연구소에서 이룬 가장 큰 성과는 다양한 산업군에 적용할 수 있도록 기능을 보강했다는 것이다. 첫째, 최대 200개로 한정된 연속 보간 수행을 개선하여 내부 노드 저장 버퍼의 최대 저장 노드를 512개까지 저장할 수 있도록 수정했고, 512개를 초과한 노드가 필요한 경우 비어있는 버퍼를 검색 후 빈 버퍼 수만큼 잔여 노드를 등록하게 하였다. 잔여 노드를 계속적으로 검색 및 등록하여 무제한 연속 보간이 가능하게 한 것이다. 보간 종류로는 2축 직선 보간, 3축 직선 보간, 2축 원호 보간이 가능하며, 이를 조합한 복잡하고 다양한 형태의 제어도 가능하도록 했다.
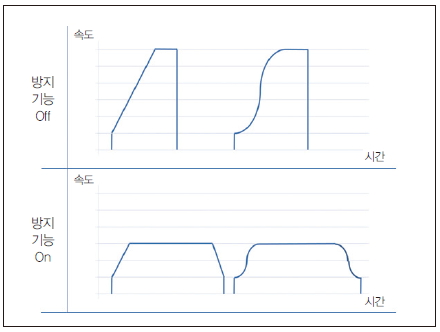
그림 4. 삼각파형 방지 기능 활성화 비교 그래프
무제한 연속 보간은 복잡한 기구물을 가공해야 하는 경우와 자동차의 엔진과 같은 정밀하고 복잡한 구조물을 비전 카메라로 검사해야 하는 경우에 필요한 기능으로써, 현재 우리나라 산업에서는 위와 같은 기능을 얻고자 고가의 외산 컨트롤러를 사용하고 있다. 또한, 연속 보간 중 IO를 제어 할 수 있도록 했다. 이 기능은 파익스만의 독창적인 기능으로서 디스펜서 관련 장비에 효과적으로 사용할 수 있을 것으로 예상된다.
둘째, 연속 보간 구동 중 짧은 이동 구간에서 ‘가속 → 등속 → 감속’이 가능하지 않는 경우 현재 노드(n)의 동작 속도가 다음 노드(n+1)의 동작 속도에 영향을 미치게 된다. 이럴 경우 장비의 진동에 영향을 주게 되며, 보간 동작의 결과물을 얻기 위해 여러 가지 많은 노력이 필요하게 된다. 이를 좀 더 쉽고 간편하게 만들어주기 위해 노드(n-1)의 최종 동작 속도에서 다음 노드(n+1)의 시작 속도로 현재 노드를 자동으로 변경하여 구동하도록 했다. 그 결과 장비의 진동을 최소화할 수 있을 뿐만 아니라 오동작을 미연에 방지할 수 있을 것이다. 이 기능을 연속 보간 중 삼각파형 방지 기능이라는 자체 명칭을 만들어 보았다.
연속 보간에서의 삼각파형 방지뿐만 아니라 일반적인 동작 상태(사다리꼴 운전(단축, 2축, 3축, 직선, 2축 원호), S-curve 운전(단축, 2축, 3축 직선))에서도 삼각파형 방지 기능을 활성화할 수 있다.
정만교 차장 _ 파익스 기술영업부









































































/pdf.png)
/smartmap_2_01.png)
/smartmap_2_04.png)
/smartmap_2_big_04.jpg)
/smartmap_2_05.png)
/smartmap_2_big_05.jpg)
/smartmap_2_08.png)
/smartmap_2_big_09.jpg)
/smartmap_2_09_2.png)
/smartmap_2_big_10_2.jpg)


/smartmap_2_11_2.png)
/smartmap_2_big_12_2.jpg)
/smartmap_2_02.png)
/smartmap_2_03.png)
/smartmap_2_06.png)
/smartmap_2_big_07.jpg)
/smartmap_2_07.png)
/smartmap_2_big_08.jpg)
/smartmap_2_12.png)
/smartmap_2_big_13.jpg)
/smartmap_2_13.png)
/smartmap_2_big_14.jpg)
/smartmap_2_14.png)
/smartmap_2_big_15.jpg)
/smartmap_2_15.png)
/smartmap_2_big_16.jpg)
/smartmap_2_16.png)
/smartmap_2_big_17.jpg)
/smartmap_2_17_2.png)
/smartmap_2_big_18_2.jpg)
/smartmap_2_18_2.png)
/smartmap_2_big_19_2.jpg)
/smartmap_2_19._2.png)
/smartmap_2_big_20_2.jpg)
/smartmap_2_20.png)
/smartmap_2_big_21.jpg)
/smartmap_2_21.png)
/smartmap_2_22.png)
/smartmap_2_23.png)
/smartmap_2_24.png)
/smartmap_2_25.png)
/smartmap_2_26.png)
/smartmap_2_27.jpg)